Researchers are making progress in building a radio telescope array that would be placed on the far side of the moon by a robot. The robot, or rover, would be controlled by NASA astronauts in the Orion spacecraft.
A team at the University of Colorado Boulder, lead by Jack Burns of the Lunar University Network for Astrophysics Research (LUNAR), has developed a system that “mimics rover control to recognize potential problems with human-telerobotic operations, such as time lags and communication quality,” according to Space.com.
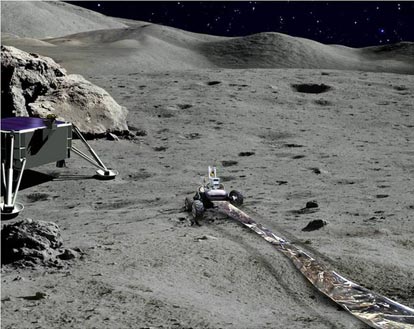
The team is evaluating “how a small rover can spool out lengthy pieces of Kapton film on the lunar far side. Kapton would serve as a robust, lightweight backbone for an array of low-frequency antennas that could be deployed by a modest rover,” Burns explained.
The arms of the Kapton would be stretched out on the lunar far side of the moon, which is a location free of radio-frequency interference. “Such rover-deployed antennas would allow scientists to study the formation of the first stars and black holes, among other cosmic phenomena, advocates say.”
“The team has developed a telerobotic simulation system that includes tools for imitating the complications associated with remote rover operations. These tools include methods for mitigating issues of latency — the delay time between stimulus and response — and communication quality between orbiting astronauts and surface-based rovers,” according to Space.com
“We want to change the paradigm of how you operate rovers on the surface of the moon, Mars and other destinations. That means we need to have a system we can operate in real time, and also have good hazard avoidance, too. That kind of real-time teleoperation is really a different philosophy than what NASA has been using for most of the last 40 years,” Burns added.