In automobile production, industrial robots and production lines largely relieve people of having to work with heavy loads. This is not the case for people who work in a trade or in care, where the body can be heavily burdened by hard work. In the PowerGrasp project, a second skin provides additional strength. Following three years of research, the promising results are now available.
In road construction, care for the elderly or logistics, the work processes are so individual that technology cannot easily be implemented to relieve people of physical strain. However, if the tradesperson, the carer or the transport worker could wear a relief support system in form of an orthosis that increases his or her strength, the work would be easier and less hazardous to health.
The project PowerGrasp, which has been funded by the Federal Ministry of Education and Research (BMBF), began in 2015 (reference number 16SV7313K). Under the leadership of Würth Elektronik Circuit Board Technology (CBT), various commercial enterprises worked together with both university and non-university research institutions. “The aim of this project was to develop an active orthosis with soft mechanics for the arm and hand in order to support workers of all ages in manual, musculoskeletal and stressful activities,” explains Dr. Jan Kostelnik, Head of Research and Development at Würth Elektronik CBT.
The three-year research project has now been successfully completed. The network coordinators were Würth Elektronik CBT and the Fraunhofer Institute for Production Systems and Construction Technology IPK. Partners were the Evangelische Hochschule Nürnberg, the Schunk GmbH & Co. KG, the Textile Research Institute Thuringia-Vogtland e. V. (TITV), Berlin University of the Arts (UdK), warmX GmbH, the Rehabilitation Center Lübben and Volkswagen AG (associated partner) as well as other participants from industry and trades.
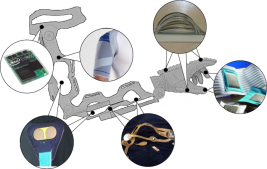
“As technology partner, Würth Elektronik CBT was responsible for the technical implementation of the sensors as well as the development and manufacture of electronics,” explains Dr. Jan Kostelnik. In the course of the project, the researchers explored modern textiles in which electronic components as well as power-boosting pneumatic drive elements, i.e. air-powered, can be installed. The result is a soft robotic orthosis which can be worn. Further work dealt with smart materials, for example to record muscle activity. With the help of algorithms, muscle fatigue can be identified and the support adjusted if necessary.
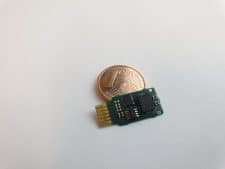
“By working on the PowerGrasp project, we have made significant steps forward. In addition to the research and implementation of a mobile soft-robotic hand-arm-shoulder support system for overhead work, we were able to continue the miniaturization of the electronics and pneumatics by using flexible and stretchable printed circuit,” summarizes Dr. Jan Kostelnik from Würth Elektronik CBT.

In principle, the technology will also be able to support the elderly and people with disabilities in everyday life. In the long term, the project partners work on developing a complete exoskeleton, i.e. a suit to support all movements. During the year, the demonstrators will be presented to the public at various fairs and conferences. Many of the individual components developed in the project will lead to innovations in robotics, sensors, portable electronics and human-machine interaction as well as in other areas of sensor- and electronics-based applications.
Background of the Research Project
Back complaints are one of the most common reasons for inability to work in Germany. Carpal tunnel syndrome and epicondylitis of the elbow (“tennis elbow”) are also on the rise. The main cause of these conditions is repetitive movements. Many employers therefore want to protect their workers from heavy lifting and non-ergonomic movements. Exoskeletons provide valuable services in prevention. In future, they will increasingly support workers in their work by providing increased strength for lifting and carrying or as a relieving support when standing for a long time. All available models, however, have one problem in common: fundamentally, they support all movements of the wearer – including unergonomic ones.
Exoskeletons or assistance robots require a human-machine interface to interact with humans. Sensors enable the use of active, controlled support mechanisms. For body-hugging support systems and in soft robotics, it is therefore necessary to develop “soft sensor” systems. Würth Elektronik CBT creates new possibilities in design and application with stretchable printed circuit boards – TWINflex Stretch. The supply, biocompatible PCBs adapt to the body shape. Integration into textiles is possible. In the PowerGrasp project, a network of sensors is operated with TWINflex Stretch printed circuit boards. For example, the SmartSensX sensor nodes capture the human position with MEMS inertial sensors and provide the data via wireless or wired interfaces. At Würth Elektronik CBT, the system of sensors and evaluation unit is called Q.mod.