The Issue
From the beginning of aviation, knowledge of the aircraft direction during flight has been critical to locating destinations. The magnetic compass was used for centuries in shipping, and naturally, it was adopted for aircraft use. Without visible signposts or landmarks, direction relies on the compass to provide the necessary information. The compass aligns with the Earth’s magnetic field pointing north, or we should say magnetic north, which may not be true north depending on your location and the field variations. Advances in technology have provided fantastic tools associated with global positioning that allow us to pinpoint our location, and with minor movements, obtain direction information. However, the magnetic compass remains a critical item in aircraft, shipping, and walks in the woods as a primary or emergency back-up system to determine heading and location. In cases of a power outage or satellite reception interference, the compass becomes the mainstay for aircraft direction information.
Many issues are associated with the use of a compass, but with training and familiarity, the pilot can readily compensate for most issues. However, placing items that affect the compass reading causes errors that are uncompensated, leading us to a need for identifying the error or choosing placements that keep the error to an acceptable degree (pardon the pun).
RTCA DO-160 includes testing for magnetic safe distance evaluation as part of the device approval process for commercial aviation. This applies to electronic equipment where the electrical current can vary the magnetic field, and for static equipment that has a magnetic signature, such as speakers with a permanent magnet.
The regulations go beyond items installed in aircraft to include cargo and carry-on devices. If the magnetic field exceeds 0.002 Gauss with 2.1-meters distance, the package is classified as dangerous goods, and a field exceeding 0.00525 Gauss with 4.6-meters distance, the package is generally restricted from air shipment.
The Requirements
Since the focus of this article is DO-160, the requirements are identified by the distance that will cause a one-degree compass deflection with a category (see Table 1) assigned to each distance increment. In order to make the measurements accurately, a few elements that affect the measurement equipment must be considered—this will be discussed in the test process section below.
Table 1: Category / Distance
| Category | Distance (meters) | Note |
| Y | 0.0 | Adjacent to compass |
| Z | 0 – 0.3 | |
| A | 0.3 – 1 | |
| B | 1 – 3 | |
| C | >3 | Report minimum distance |
Other standards and regulations may impose a deflection or field strength requirement without categories, as mentioned above, about dangerous goods. Although the distance and field strength may be different, the basic process for determining the distance is the same as the need to convert some measurement data.
Test Method
The test method described in DO-160 is based on using an uncompensated compass measuring the deflection angle with the equipment under test (EUT) located at the distance that causes a compass deflection of one-degree.
A few steps are involved in the measurement process, as described below, to ensure measurement accuracy.
Test Location
The test location is chosen to minimize the influences of material that present a relative permeability greater than one, or simply put avoid ferrous metals. A magnetically neutral place in the laboratory or even outdoors prevents the magnetic flux lines from being concentrated.
The location needs to support the test configuration, including the support equipment, with a distance large enough to avoid a compass deflection from the EUT. Consider that the EUT should be moved for testing instead of moving the compass. It is very difficult to move the compass without some change in the initial angle setting—remember we are trying to measure less than one degree. Placing the EUT on a plastic cart is a preferred approach to observing the compass while the distance is closing.
Location Offset
Field measurements are based on a uniform field with a horizontal intensity of 14.4 A/m (equivalent to a flux density of 18129 nT in the air or magnetically neutral environment) as produced by the Earth. As indicated above, the Earth’s magnetic field at any given location varies with time and the location’s elevation. If the test location is not 14.4 A/m ±10%, then it is outside the horizontal tolerance, and a different deflection angle based on the offset is used replacing the one-degree deflection in the requirements.
The formula to determine the deflection constant (dc) is provided in Equation 1, assuming you know the location horizontal ambient field intensity at your test location at the time of the test. If you do not know the site field intensity, then you can measure it or get it from a reliable source.
Measuring the field intensity with a magnetometer is a simple process where the sensor probe is oriented to a horizontal measurement, and the reading is obtained.
If a calibrated magnetometer is not available, then the information can be obtained from the National Geophysical Data Center (NGDC)/National Oceanic and Atmospheric Administration (NOAA) website. You will need to input your latitude, longitude, altitude, and date information and select calculate. A map should appear showing the location and inside the map frame, select table, and the field values are presented. In a random location I chose for this discussion, the H(nT) or horizontal flux density of 22403 nT was listed. Using 18129 nT in place of 14.4 A/m in Equation 1 divided by the H(nT) flux density yields a dc=0.81 degrees. This means that the EUT distance producing a compass movement of 0.81-degrees is used to determine compliance with the applicable test category.
dc= 14.4
__________________
Horizontal ambient field
Equation 1: Deflection Constant Adjustment
Compass Validation
We often look at an uncompensated compass as a passive device that is not subject to calibration, but how do we answer the question regarding the accuracy if we are unable to validate the measurement. Normally the compass operates, but if dropped, the needle could be movement restricted and require a larger field to initiate or obtain the proper movement. Compasses are available that allow for calibration, but the typical laboratory-grade compass is sealed with no access to adjusting the dial. Checking the ability to measure small movements is not very difficult using this procedure, and this helps assure all that the measurements are correct.
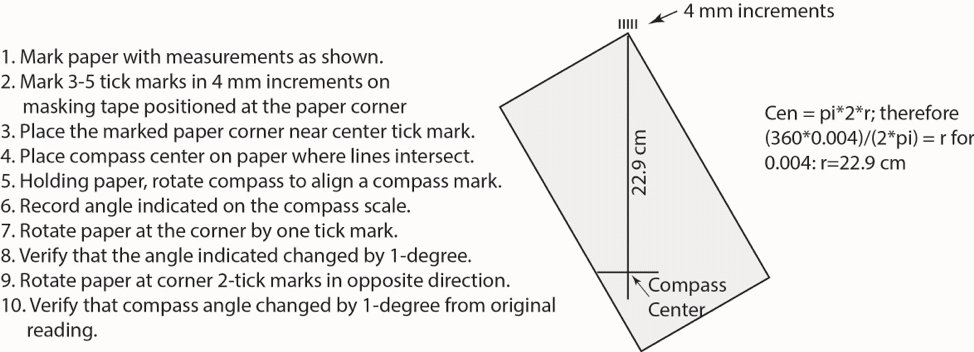
Figure 1 provides a procedure using a sheet of paper, a ruler, and a small piece of tape to check the compass. A circle that allows for 360 equally spaced increments of 4 mm would have a radius of 22.9 cm, as shown in Figure 1. From the corner of the paper, mark a line that supports a marker to be placed at the radius. At the 22.9 cm distance from the corner, place a line crossing the radius line to identify the center point for the compass. On another sheet (I use a piece of masking tape to keep it in place) mark five tick marks at 4 mm increments. Place the marked paper, with the corner at the center tick mark, and record the compass reading (move the compass to obtain alignment with a degree marker of the compass). Once you have the compass aligned on the paper, you may want to temporarily attach the compass to the paper to maintain the alignment. Now, rotate the paper one tick mark, with the compass stable on the paper, and verify that the degree measurement changed by one degree. Rotate the paper in the opposite direction by two tick marks, and verify that the measurement changed by one degree from the original reading.
This procedure assures the user that the compass is operating correctly. Using a compass with a viewing magnifier, one can obtain movement resolution of approximately 0.1-degree increments.
Test Configuration
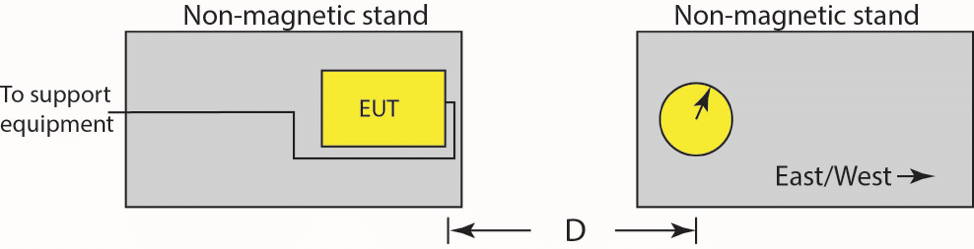
Figure 2 provides a sketch of the test configuration with the EUT located on a magnetically neutral stand (as I stated earlier, a plastic cart allow the EUT to be moved). Watch for metal legs on the stand that could distort the EUT emitted flux lines. The test stands should allow the EUT to be at the same level as the compass, and larger EUTs may need testing at multiple heights to align horizontally with the compass.
The compass is placed on its stand to allow the East-West direction to be approached by the EUT. Note that East-West means magnetic East-West, not geographic East-West.
The EUT cables are routed perpendicular and away from the compass to the support equipment. The cables should be the same a used in the installation with a length of 3.3-meters unless otherwise specified. The support equipment is located as far a possible from the compass on the East-West axis of the compass.
Test Process
Seems like we have had to do a lot of preparation for testing, but that is not unusual for many compliance test methods. We need assurance that the measurements are meaningful and accurate.
Now that the preparation is complete and our test equipment checked, the testing is straightforward, but using two people really speeds the measurement process—one to watch the compass, and one to move the EUT.
With the EUT located away from the compass, establish operation of the EUT and confirm that the compass angle has not changed because of the operation. Slowly move the EUT closer to the compass, while observing the compass needle movement. Stop the EUT movement when the compass deflection reaches the deflection constant determined for the test location and test date. Record the distance that caused dc to be attained.
Repeat the test process for each orthogonal plane and test elevation of the EUT recording the distance on the datasheet.
It should be noted that the EUT testing is applicable to the worst-case steady-state mode of operation. A short-duration current surge that causes a single compass angle movement is not considered a failure. However, if transients repeat resulting in the compass angle to deflect, then that mode would apply.
EUT operational settings should be considered to maximize the magnetic field. For example, the brightness of a laptop computer affects the current to light the screen and an increased current produces higher magnetic fields. Transmit mode may be different than receive mode. The test procedure should establish the modes to be examined and settings of the EUT for those examinations.
Compliance Issues
Testing reveals that magnetic field issues are present. There are many ways to reduce the emitted fields but a lot of them may alter the operational performance or significantly change the size or weight which may not acceptable for certain installations.
Reduce the current—if the results show that the field strength is related to the current demands, then reducing the load could resolve an issue if the operational performance can tolerate the current restriction.
Create an opposing field by sensing the field and generating an equal and opposite field that would cancel the emitted field. If the field is static such as a speaker magnet, a permanent magnet placed to cancel the field could resolve the issue.
Shielding is often considered to be the first line of defense But many devices and applications are unable to tolerate the additional weight associated with any shield materials. Lightweight shield material can be effective but require a very low impedance return (ground). Ferrous metals can provide a low impedance path for the flux lines but tend to be heavy and/or thick to prevent saturation. Laminating thin ferrous sheets can reduce weight because each of the sheets must saturate independently.
Packaging arrangements can provide cancellation of static fields by placing in a manner that locates an opposing field with another of the same device.
Resolving the magnetic field issue may challenge the thought process, but many creative methods can produce results.
Summary
As discussed above, one realizes that the test process is not very complex but an essential need to understand placement of equipment in many configurations. Failure to consider influences of the test environment and the Earth’s movement changing references will result in an inaccurate evaluation of a device.
Hopefully, you will find this information useful, and I welcome questions. I have an Excel spreadsheet that can be used as a data sheet and includes the compass verification and location field calculations that I will share at no charge if requested—just email a request stating that you will not distribute or place in the public domain and I will send it.
If you have a topic associated with EMC that you would like to have reviewed, let me know, and I will try to place it in the queue for future articles.